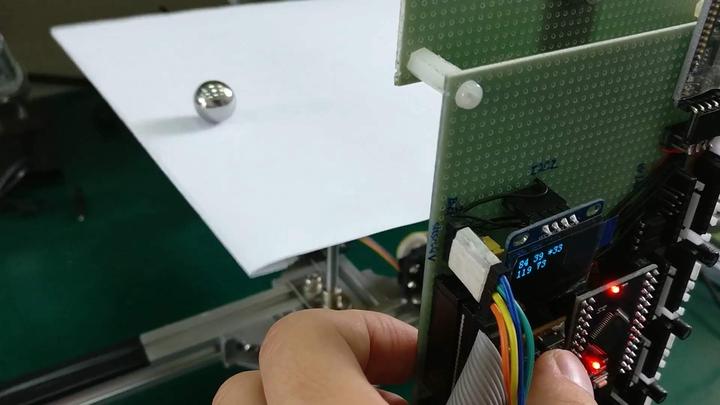
 Ball on plate in action. A simple interface is made to adjust the target position and circle radius.
Ball on plate in action. A simple interface is made to adjust the target position and circle radius.
Introduction
Ball on Small Plate is built with a Raspberry Zero, a camera, two servos, a STM32F103 board, and is capable of setting target coordinate, circling around the center with adjustable radius. This project is a work of team of 3, which includes shicaiwei123 and yoyolalala. Code and documents are available here. Platform details are discussed here.
Demo
Mechanical structure
First version
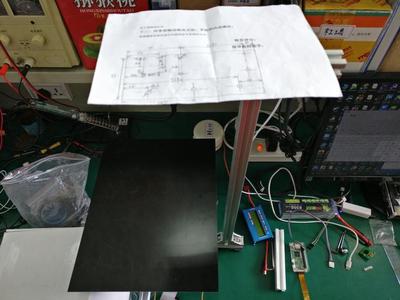
The 20cm*20cm plate is made of 1mm black glass fiber board. In the first version shown in the video, the plate is covered with white paper to provide more contrast between ball and plate. Below shows the original plate.
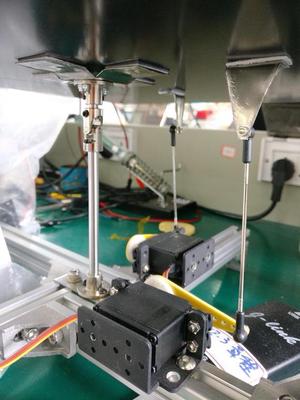
The plate is supported with a universal joint in the center and has 2 degrees of freedom. The angle of the plate is controled by two servos with ball joint rods connecting the servos and the plate.
In this first version. The camera is fixed to the base, which requires extra procedure to segment the plate from background and warp back to squre. This introduces noise to the positioning of the ball, which is the major reason for the jittering in the video.

Second version
By fixing the camera to the plate with carbon fiber tubes, we managed to avoid the noise. The Raspberry Pi 3b is hanged beyond the camera to reduce the load on the servos. The plate itself is also changed to yellow thus no paper is needed. This reduces friction between the ball and the plate.
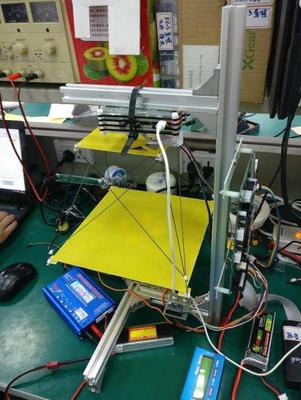
A ring light is installed around the camera for better illumination.

Below shows the PCB board installed on the base, which is later used in project Ball on Big Plate.

Cheng Zhang
Ph.D Student
My research interests include 3D generation, novel view synthesis, image generation etc.